
Scripps Institution of Oceanography
From 2023-2025, I worked for Drew Lucas at the Scripps Institution of Oceanography with his lab, Multiscale Ocean Dynamics (MOD), who specializes in making custom in-house vehicle and sensor technology for their own oceanographic research. One of MOD’s success stories includes the Wirewalker. The Wirewalker is a vertical profiling vehicle that is now a fully commercialized product and a workhorse instrument platform for ONR and NSF.
In the world of oceanography, vertical profiling is a method of data collection in which an instrument platform moves up and down within the water column, taking measurements of interest along the way. By examining the vertical composition of the ocean, we gain insight into key biogeochemical processes that govern the waters and atmosphere. Methods for vertical profiling must be long-lasting, power efficient, and robust to extreme environments for extended durations. Current methods include wave-powered Wirewalker, which power their vertical movement using energy from surface waves, and Argo floats, which control their depth using inflatable bladders. Although these platforms are mature, deploying these systems at sea is costly. Advancements in the autonomy of such systems would reduce the costs associated with manned deployment and recovery operations and enhance response times to areas of interest.
The above video explains succinctly how the Wirewalker converts surface wave energy to movement. Importantly, this platform is completely mechanical and mainly limited by the battery life of the sensor package. If there was a way to eliminate the dependency on battery life, then this self-sustaining vertical instrument platform would serve as the gold standard for oceanographic technology.
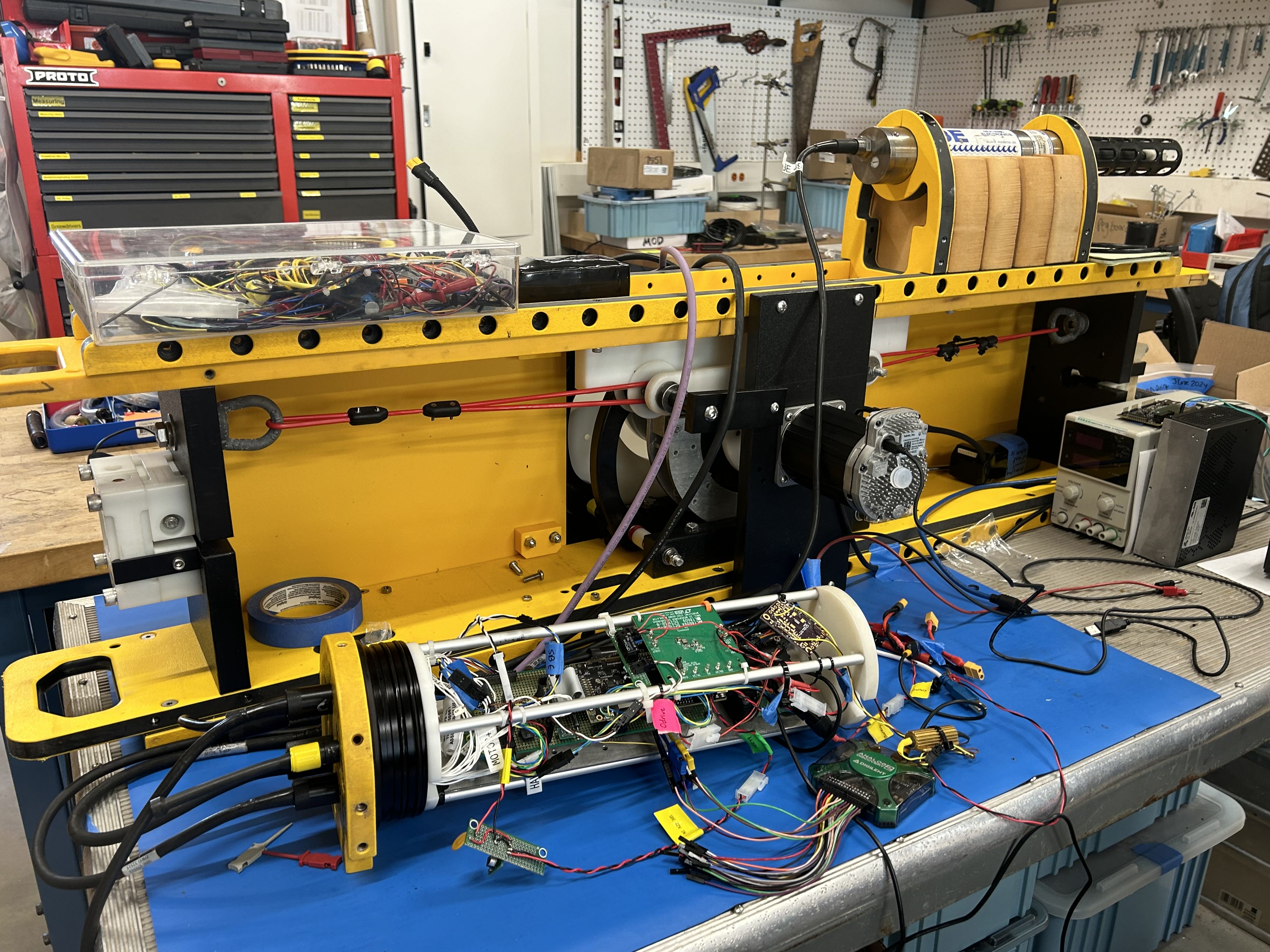
During my time as an intern with MOD, I worked on developing the prototype for the new generation of Wirewalkers in a project named Livewire. In this prototype, we replace the mechanical ratcheting system inside with a waterproof brushless DC motor (BLDC). This way, we can simultaneously transform surface wave energy into electrical energy by producing a back EMF with the motor/generator while also intelligently controlling the depth of the vehicle.

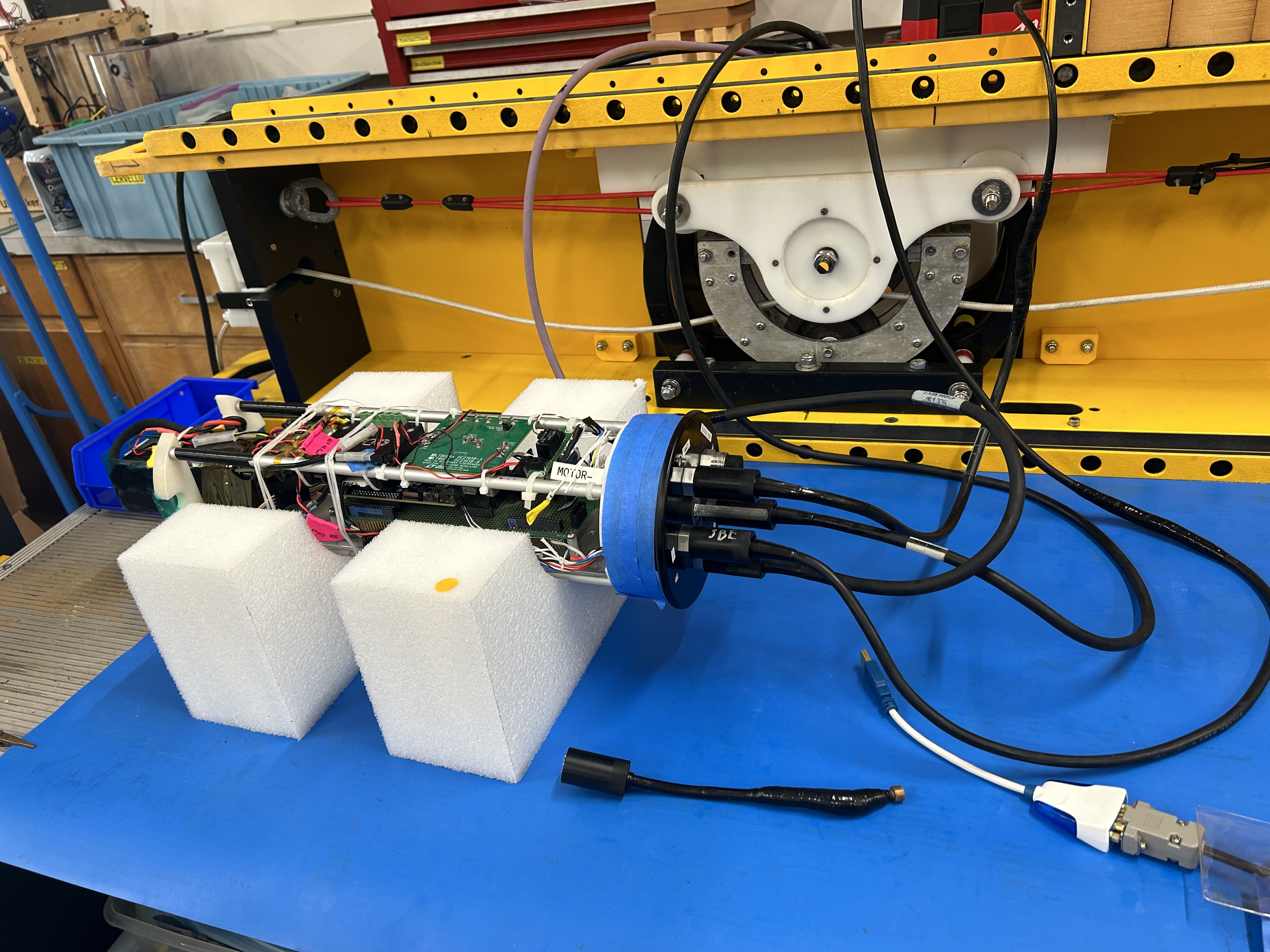
Specifically, I was deeply involved in the electrical and software development of the Livewire controller. Electrically, the challenge involved routing power to the motor and instruments while allowing a back EMF to send a reverse current back towards the rechargable batteries and implementing proper voltage and current protections. On the software side, this involved processing incoming data from a Conductivity, Temperature, and Depth (CTD) instrument, an Odrive motor controller, and serial communications from a PC. The embedded controls are done entirely in C, and a MATLAB program is used for a GUI to control the vehicle and display data in real time.
We deployed Livewire in the field with several pool and ocean tests, and under these conditions we successfully proved and recorded the regenerative capabilities of the system.